ML-Agents のPython 向け低レベルAPI(LLAPI )を使って、独自のやり方で強化学習を行います。
関連
- ◯
- ML-Agents の低レベルAPIを使う(NNモデル適用編):LLAPI, Barracuda, ONNX
- ◯
- コンテナに強化学習のフレームワークを設置する:Docker, ML-Agents
概要
- ◯
- 背景
ゲームエンジン「Unity 」には、強化学習のフレームワーク「ML-Agents 」がありますがーー
- ◯
- 問題
ただそのフレームワークに沿ったやり方では、提供された強化学習のアルゴリズム(PPO やSAC など)しか使えません。また代表的な強化学習のフレームワーク(OpenAI Gymなど)のラッパも提供されていますが、その場合でも、フレームワークの作法に沿ったやり方しかできないわけです。
- ◯
- 対応
そのためML-Agents は、Python 向けのより低レベルなAPI(LLAPI )も提供していますーーこれを使えば、より汎用的なやり方(独自のやり方ふくむ)で、Unity 環境と連携した強化学習を行えるようになります。
ここでは、この低レベルAPIを使って強化学習を行います。
実装
- ◯
- 前提
エージェントとニューラルネットのモデル(NNモデル)は、ここでは「ゼロつく」の方策勾配法の実装を使いますーー強化学習のなかでも方策勾配法はシンプルなアルゴリズムですし、また「ゼロつく」では、その作り方が(フレームワークの実装ふくめ)詳細に解説されているので:[※1]
- ・
- https://github.com/oreilly-japan/deep-learning-from-scratch-4
- ・
- https://github.com/oreilly-japan/deep-learning-from-scratch-4/blob/master/pytorch/simple_pg.py
またこのコードは、OpenAI Gymの倒立振子(カートポール)の訓練用ですーーなのでいちおう、環境側の仕様も確かめておきます:[※2]
- ・
- https://gymnasium.farama.org/environments/classic_control/cart_pole/
- ◯
- 役割
なおPython 側とUnity (C#)側のコードは、それぞれ次の分担になります:
- ・
- Unity (C#)側 …… 環境と、それを観察し〜行動する3Dモデルのエージェントを用意しますーー観察と報酬をPython 側に渡し、Python 側から返された行動でエージェントを動かします。
- ・
- Python 側 …… NNモデルと、そのパラメータを更新するエージェントを用意しますーーUnity 側から返された観察と報酬から行動を決定し、Unty 側に渡します。
- ※1
- ただし「ゼロつく」独自のフレームワーク(Dezero)ではなく、Pytorch による実装を採用しますーーこれは、学習したNNモデルをUnity で使えるよう、標準形式(ONNX)で保存するためです。
- ※2
- つまり、ML-Agents が提供するOpenAI Gym向けのラッパも試せる、ということですーー独自の実装と動作を比べることもできますね。
構成
環境は、次の手順で設定します(ここではコンテナを使います):
プロジェクトのためのコンテナを用意し、ML-Agents のPython 向けのコードをダウンロードします(これにふくまれるUnity 向けの環境はここでは不要なので、削除します):
$ mkdir ${dir_docker}
$ cd ${dir_docker}
$ vi Dockerfile
$ mkdir ${dir_project_unity}
$ mkdir ${dir_project_python}
$ cd ${dir_project_python}
$ git clone --depth=1 --branch release_20 https://github.com/Unity-Technologies/ml-agents.git
$ cd ${dir_project_python}/ml-agents
$ rm -rf Project
Dockerfile には、最低限の内容だけ記述しています:
FROM ubuntu:22.04 RUN apt-get -y update RUN apt-get -y upgrade RUN apt-get -y install python3 RUN apt-get -y install pip RUN ln -s /usr/bin/python3.10 /usr/bin/python
コンテナを作成〜起動します(Unity 側と通信するためのポート「5004」を開けて起動します):
# 作成
$ docker build --no-cache -t ${container_image} ${dir_docker}
# 反映
$ docker commit ${container} ${container_image}
# 起動
$ docker run -it --rm \
-p 5004:5004 \
-v ${dir_project_python}/ml-agents:/app/ml-agents \
--name ${container} \
${container_image}
コンテナを起動したら、ライブラリ群を設置します(適宜、イメージに反映させます):
$ cd /app/ml-agents $ pip install -e ml-agents-envs $ pip install -e ml-agents
ゲームエンジン(Unity )側では、プロジェクトを作り〜ML-Agents のパッケージを導入します:
project - template: 3d - editor: 2021.2.8f1 - name: <project_unity> - path: <dir_project_unity> window > package manager > add package from git url: com.unity.ml-agents
作成:Unity
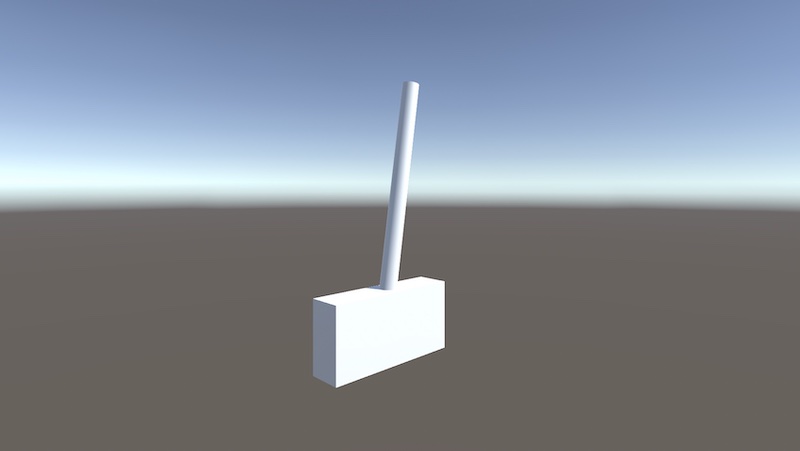
倒立振子(カートポール)の3Dモデルを作成します。[※1]
作成した3Dモデルに、次のコンポーネント群を取り付けます:
SCENE
> OBJECT
> add component
> behavior parameters
> decision requester
> <class_agent> ... クラス「Agent 」を継承するスクリプト
コンポーネント群には、次のような値を設定します(観測のサイズ、行動のサイズ、行動を決定する間隔、を指定します。そしてNNモデルを空白にすることで、訓練のモードにします):
behavior parameters > behavior name: Cpl001 > vector observation > space size: 4 > stacked vectors: 1 > actions continuous actions: 0 discrete branches: 1 > branch N size: 1 > model: <nil> decision requester > decision period: 5
- ※1
- 3Dモデルの作成は、次が参考になりましたーーカートの動く範囲を固定する、カートとポールの重量比を大きくして揺れを防ぐ、など、物理演算の影響をできるだけ小さくする工夫があります:
- ・
- https://medium.com/@goncalorrc/unity-ml-intro-tutorial-super-cart-pole-part-1-413ce1879f02
実装:Unity
Unity 側のスクリプトを記述します。
必要なモジュール群を読み込み:
using static System.Math; using UnityEngine; using Unity.MLAgents; using Unity.MLAgents.Sensors; using Unity.MLAgents.Actuators;
名前空間とクラスを定義し、クラス内で使う変数群を定義〜初期化しますーーなおクラスは「Agent 」を継承します:
namespace <namespace_project> {
public class <class_agent>: Agent {
public float fcemov = 100.0f;
public float radmax = 0.418f;
public float posmax = 3.0f;
private int cntstp;
private GameObject objtgt;
private GameObject objpol;
private Rigidbody rgdtgt;
private Rigidbody rgdpol;
private float radpol_bgn;
ゲーム全体を初期化しますーーここでは、カート(objtgt)とポール(objpol)の実体と、それぞれの物理演算のためのコンポーネント(リジッドボディ)を得ます:
public override void Initialize() {
objtgt = this.gameObject;
rgdtgt = objtgt.GetComponent<Rigidbody>();
objpol = objtgt.transform.Find("<name_pole>").gameObject;
rgdpol = objpol.GetComponent<Rigidbody>();
}
エピソードごとに行う処理を記述しますーーここでは、カートとポールの位置・回転を、初期の状態に配置します:
public override void OnEpisodeBegin() {
cntstp = 0;
objtgt.transform.position = Vector3.zero;
objtgt.transform.localRotation = Quaternion.identity;
objpol.transform.localPosition = new Vector3(0.0f, 1.5f, 0.0f);
objpol.transform.localRotation = Quaternion.identity;
}
観測が呼ばれたときの処理を記述しますーーここでは、カートの位置と速度、ポールの角度と速度(角速度)を取得します:
public override void CollectObservations(VectorSensor sensor) {
sensor.AddObservation(objtgt.transform.position.x);
sensor.AddObservation(rgdtgt.velocity.x);
sensor.AddObservation(SymmetricalRadian(objpol.transform.localEulerAngles.z * Mathf.Deg2Rad));
sensor.AddObservation(rgdpol.angularVelocity.z);
radpol_bgn = SymmetricalRadian(objpol.transform.localEulerAngles.z * Mathf.Deg2Rad);
}
行動の決定が呼ばれたときの処理を記述しますーーここでは、エージェントが返した値により、カートを左右どちらかに動かします。また報酬を返し、終了条件を満たしていれば、エピソードの終了を返します:[※1]
public override void OnActionReceived(ActionBuffers action) {
int flgact;
float postgt_end;
float radpol_end;
float rwdpol = 0.0f;
//行動
flgact = action.DiscreteActions[0];
if (flgact == 0) {
rgdtgt.AddForce(new Vector3(+ fcemov,0.0f,0.0f));
}
if (flgact == 1) {
rgdtgt.AddForce(new Vector3(- fcemov,0.0f,0.0f));
}
//結果:報酬
SetReward(1.0f);
//結果:終了
if (radpol_end > + radmax || radpol_end < - radmax || postgt_end > + posmax || postgt_end < - posmax) {
EndEpisode();
}
}
- ※1
- ここでの報酬は、たんにステップを終えたら1単位を与えるだけですーーこれはOpenAI Gymのカートポールの報酬の与え方に準じていますーーようするに、エピソードを長く続ける(1エピソードのステップ数が大きい)ほど、報酬が大きくなる、ということをエージェントに示唆するものです。
次は、角度をラジアンに変換する関数です(これもOpenAI Gymに合わせていますが、じっさいこの方が終了条件を記述しやすいですしね):
private float SymmetricalRadian(float radorg) {
if (radorg > Mathf.PI) {
radorg = radorg - Mathf.PI * 2;
}
return radorg;
}
実装:Python
Python側のスクリプトを記述します。
NNモデルとエージェントのクラス定義は、元のコード(simple_pg.py)のものをそのまま使います(Policy, Agent )。ライブラリ群は次のものを使い(gym の代わりにUnityEnvironmentをを使う、など)、トレーニングの記述はすべての行を消しておきます(env = gym.make('CartPole-v0'〜以降は削除):
# 次のライブラリ群を使用: import sys import numpy as np import torch import torch.nn as nn import torch.nn.functional as F import torch.optim as optim from torch.distributions import Categorical from mlagents_envs.environment import UnityEnvironment, ActionTuple # 次のクラス定義は残す: class Policy(nn.Module): ... class Agent: ... # ここから以降は削除
以降、追加するトレーニングの記述ですーー環境(Unity )とNNモデルおよびエージェントをインスタンス化し、環境をリセットします。学習する回数はスクリプトの引数から取得し、エージェントの名前は環境から取得します:[※1]
trials = sys.argv[1] envuni = UnityEnvironment(file_name=None) agtnnm = Agent() envuni.reset() agtnam = list(envuni.behavior_specs)[0]
- ※1
- 環境(UnityEnvironment)のfile_name をNoneとすることで、訓練をエディタから実行することができますーービルドした環境を使う場合は(この方がより早く訓練できます)、その実行ファイル名を指定します。
NNモデルのパラメータは、エピソードごとに更新します:
for cntepi in range(int(trials)): # ... エピソード内の記述 agtnnm.update()
エピソード内では、環境をリセットし〜ステップごとの決定と終了のための配列を取得します。ステップ内のエージェントの状態を初期化したあと、ステップごとの反復に入ります:
# 初期(エピソード)
envuni.reset()
stpdcs, stptrm = envuni.get_steps(agtnam)
agtstp = -1
endepi = False
while not endepi:
# ... ステップ内の記述
ステップ内では、エージェントの状態を取得します:
if len(stpdcs) >= 1:
agtstp = stpdcs.agent_id[0]
rwdstp = 0
環境(Unity )から観測の結果を得て:
sensor = stpdcs[agtstp].obs[0]
観察から行動を決定し、その決定を環境(Unity )に返します:
actnnm, prbnnm = agtnnm.get_action(sensor)
#actnnm, prbnnm = agtnnm.get_action(np.array(sensor,dtype=float)) # Python のバージョンによってはこちらを使います
action = ActionTuple()
action.add_discrete(np.array([[int(actnnm)]]))
envuni.set_actions(agtnam,action)
ひとつの行動を終えたら、環境(Unity )をリセットし〜ステップごとの決定と終了のための配列を取得します。このときエージェントの状態が決定の状態を満たしていれば、報酬を得ます。さらに終了の状態を満たしていれば、報酬を得て、ステップから抜けるようにします:
# 切替(ステップ)
envuni.step()
stpdcs, stptrm = envuni.get_steps(agtnam)
# 結果(報酬/終了)
if agtstp in stpdcs:
rwdstp = rwdstp + stpdcs[agtstp].reward
if agtstp in stptrm:
rwdstp = rwdstp + stptrm[agtstp].reward
endepi = True
# 処理(ステップ)
agtnnm.add(rwdstp,prbnnm)
最後に、環境(Unity )を終了させます:
envuni.close()
訓練
訓練は、Python のスクリプトを起動し、Unity のエディタからプロジェクトを実行することで始められます:
$ python ${script_train}.py 3000